Education
M.S. in Computer Science (OMSCS) — Georgia Institute of Technology
2024-08 – 2026-05 · Atlanta, GA
- Machine Learning, Deep Learning, Machine Learning for Trading, AI for Robotics
- Part-time while working; building real-world ML and automation projects.
Relevant Projects
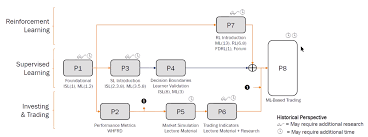
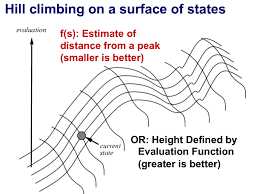
Strategy Evaluation
Compared rule-based vs random forest strategies for trading using technical indicators.

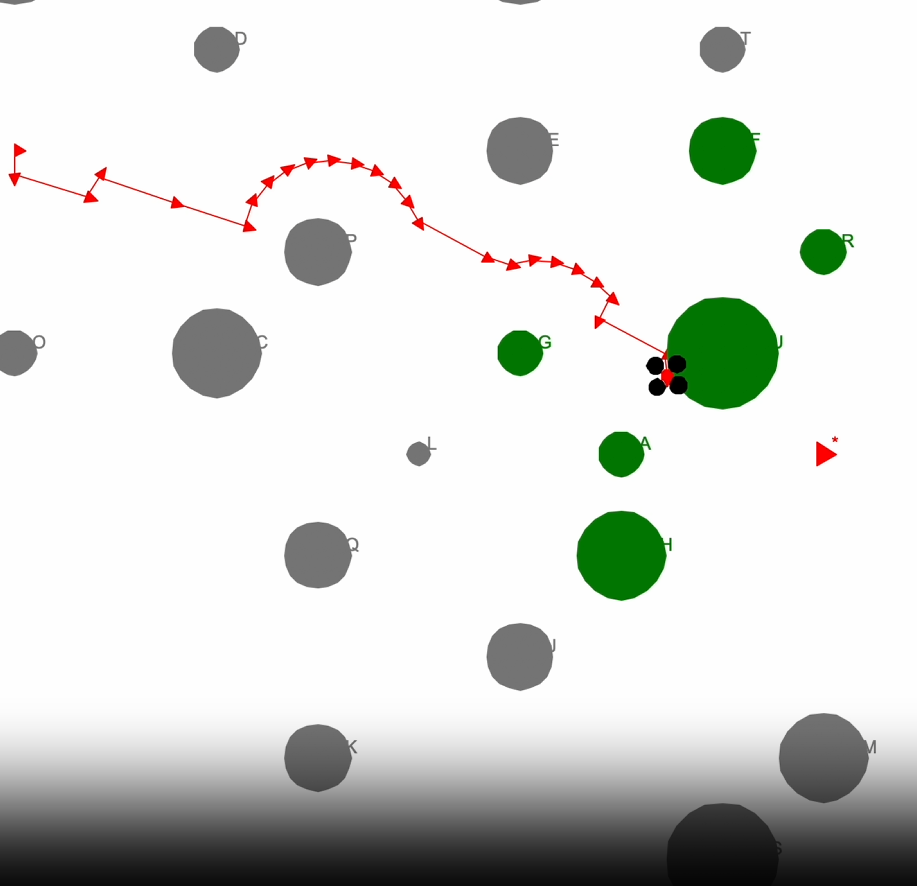
Warehouse – A* Search
Developed a warehouse robot routing algorithm using A* search to optimize item pickup and delivery.
Indiana Drones – SLAM
Built SLAM system to navigate a drone through a jungle using noisy sensor data.
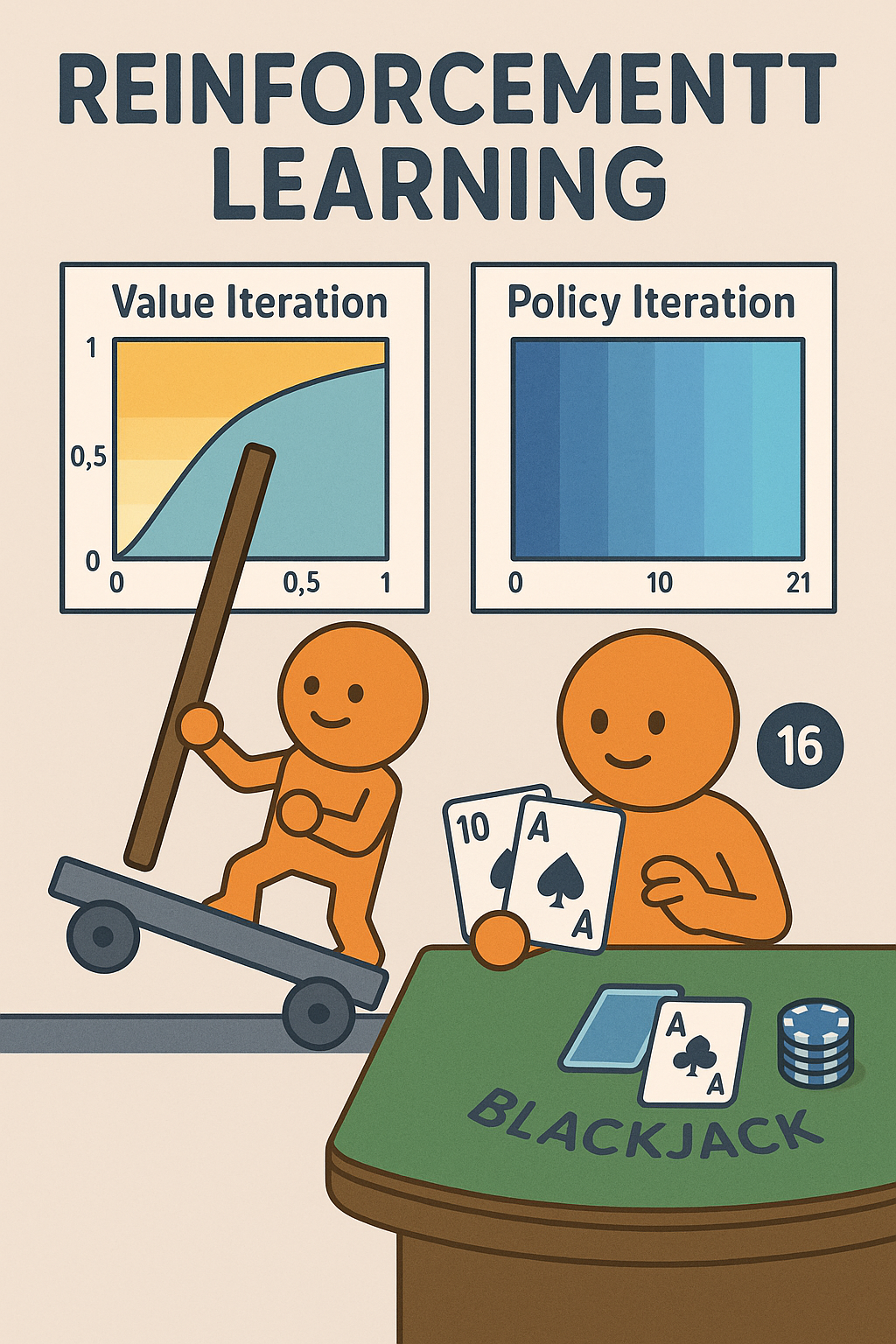
Reinforcement Learning on MDPs
Implemented Value Iteration, Policy Iteration, and Q-Learning to solve Blackjack and Cartpole balancing.
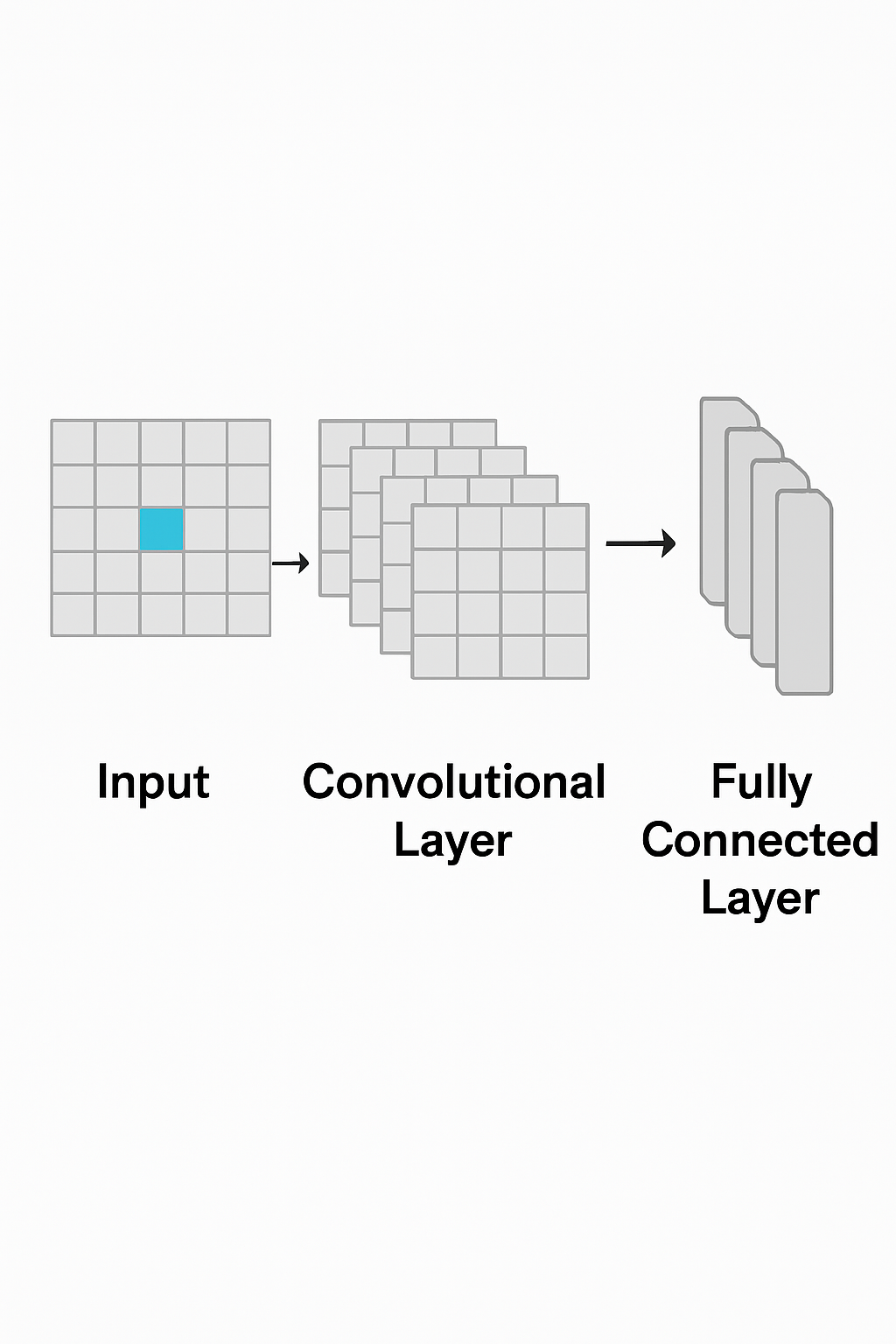
CNNs from Scratch & in PyTorch
Built CNN layers manually using NumPy, then migrated to PyTorch for classification tasks using custom loss functions.
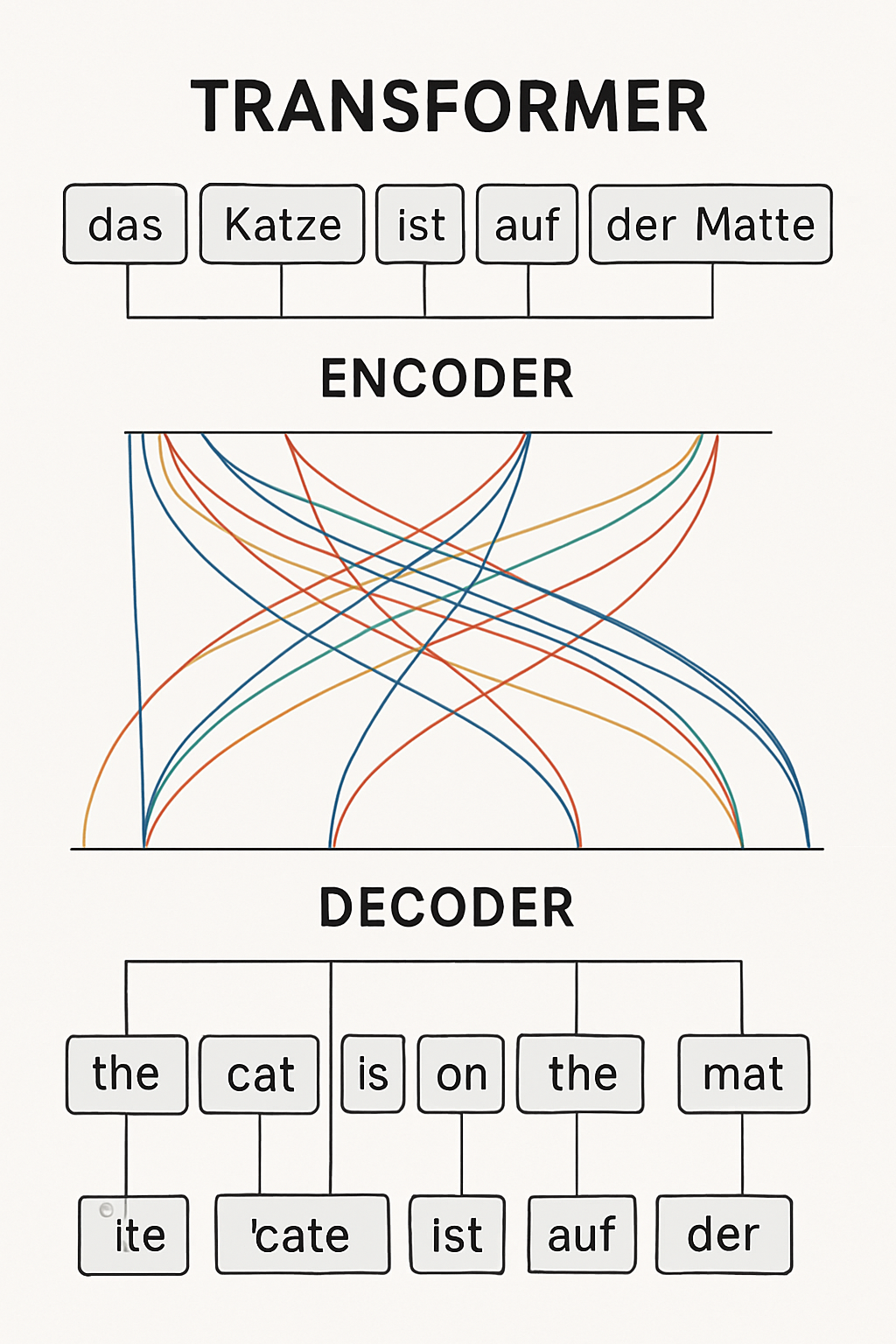
Transformers for Sequence Modeling
Implemented Transformer and Seq2Seq models for language translation using attention mechanisms.
Audio Classification on Edge Devices
Compared CNNs and Transformers for classifying audio signals on edge devices using knowledge distillation.
Show all projects from this degree

Martingale Strategy
Simulate American roulette to study statistical outcomes and test the martingale betting strategy.

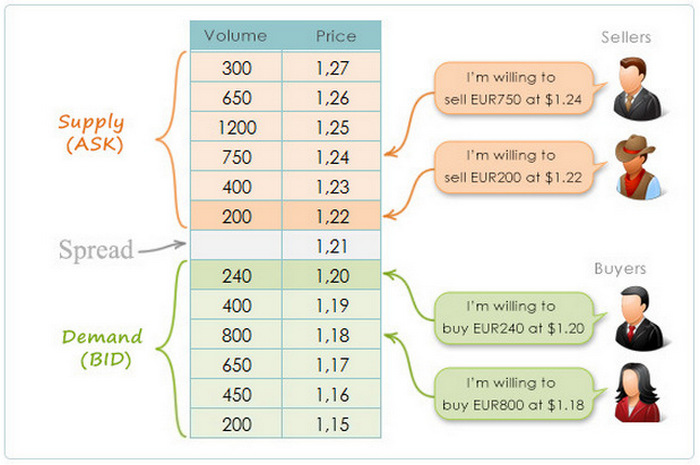
Portfolio Optimization
Built a portfolio optimizer using historical financial data. Modeled constraints and risk-return tradeoffs.
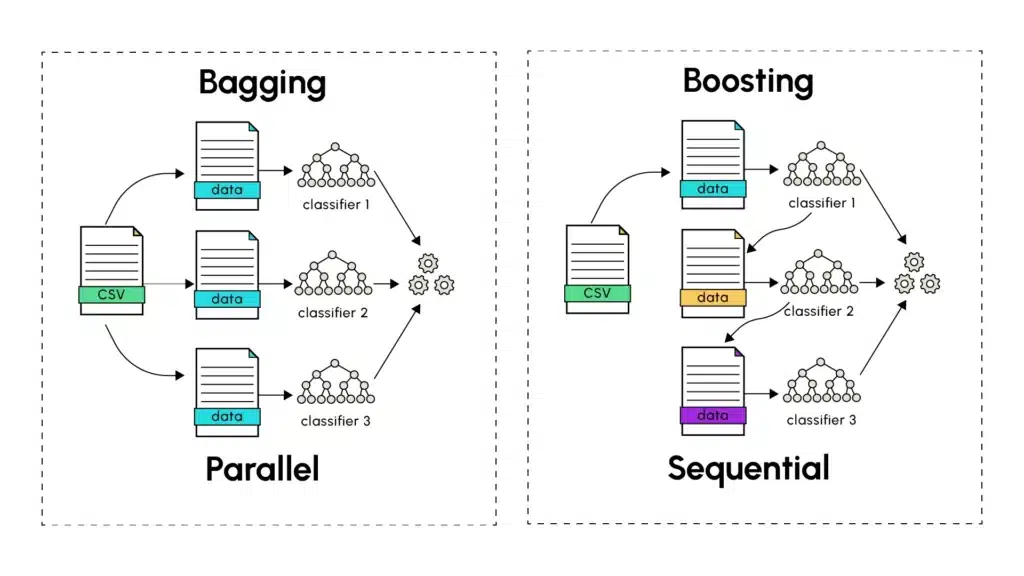
Assess Learners
Implemented and compared decision trees, bagged learners, and ensemble methods to analyze learning behavior and overfitting.

Defeat Learners
Designed datasets that expose the weaknesses of various machine learning algorithms by favoring specific learners.
Market Simulator
Created a custom simulator that processes trade orders and computes portfolio performance over time.

Indicator Evaluation
Evaluated technical indicators and used a 'theoretically optimal strategy' to simulate trading performance using future data.
Q-Learning Robot
Implemented Q-learning to train a robot to navigate a dynamic environment with exploration/exploitation balance.
Hopscotch – Kalman Filters
Used Kalman Filters to navigate a damaged spaceship by estimating asteroid positions from noisy data.
Solar System – Particle Filters
Used particle filters to localize a spacecraft using planetary gravitational readings in a simulated solar system.
Drone Control – PID Controller
Implemented a PID controller to stabilize a drone in 3D space for infrastructure inspection tasks.

Supervised Learning – Imbalanced Dataset
Trained SVM, KNN, and Random Forest on imbalanced data, focusing on analysis of the models and tradeoffs.
Randomized Optimization Algorithms
Applied RHC, SA, GA, and MIMIC to solve discrete optimization problems and tune neural network weights.
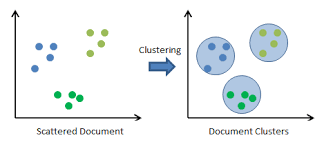
Unsupervised Learning & Dimensionality Reduction
Used PCA, ICA, ISOMAP, and clustering to reduce dimensions and enhance neural network performance.
Neural Network from Scratch
Built a complete neural network from scratch in NumPy and trained it on MNIST.
B.S. in Mechatronics & Automation Engineering — Ain Shams University
2018-09 – 2023-02 · Cairo, Egypt
- Strong foundation in control, robotics, and computer vision.
- Hands-on projects: UAV indoor navigation, 6-DoF manipulator in ROS, machine-vision arm.
Relevant Projects
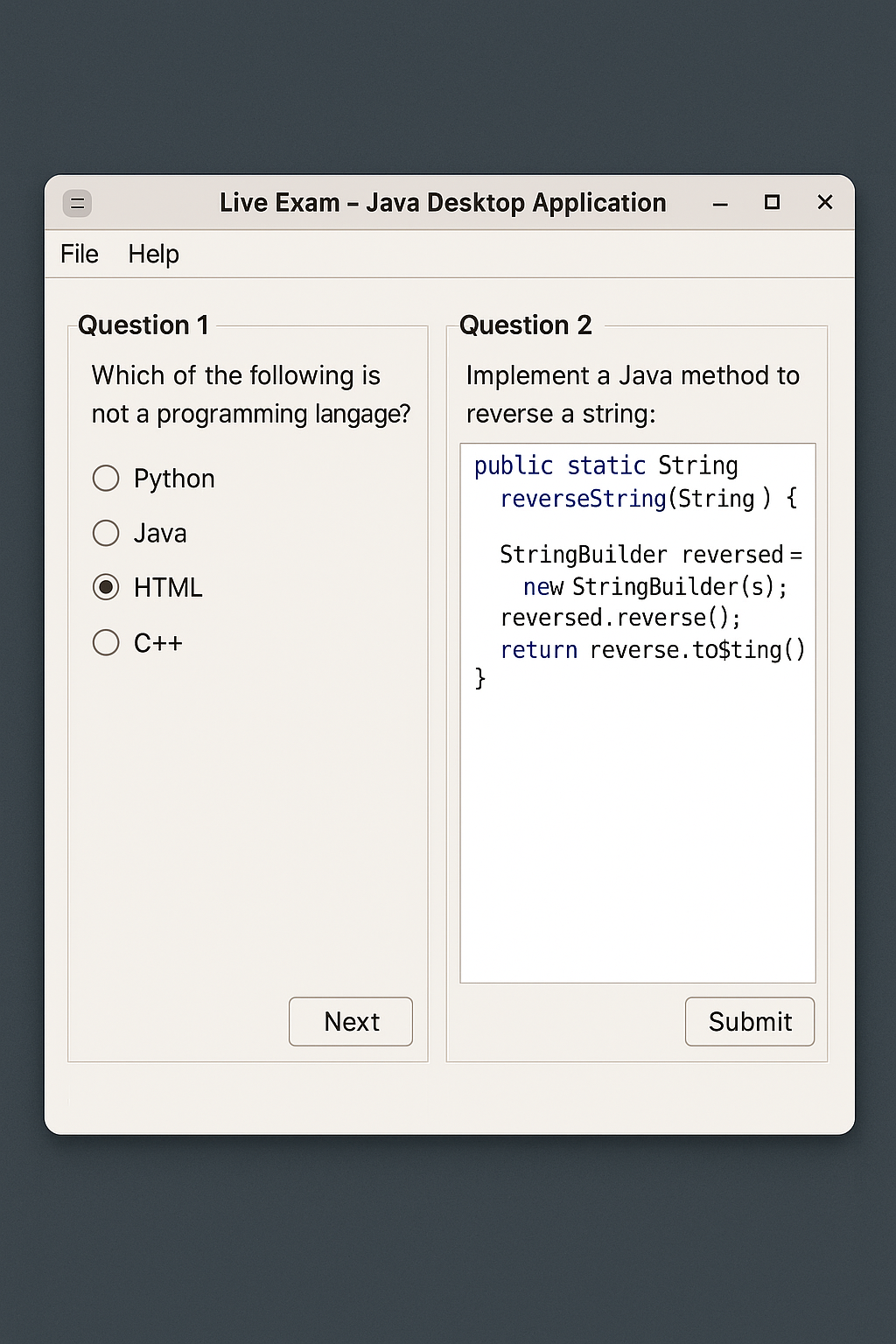
School Exam System (Java GUI)
Developed a live exam platform in Java with a GUI, supporting multiple question formats and automatic correction.
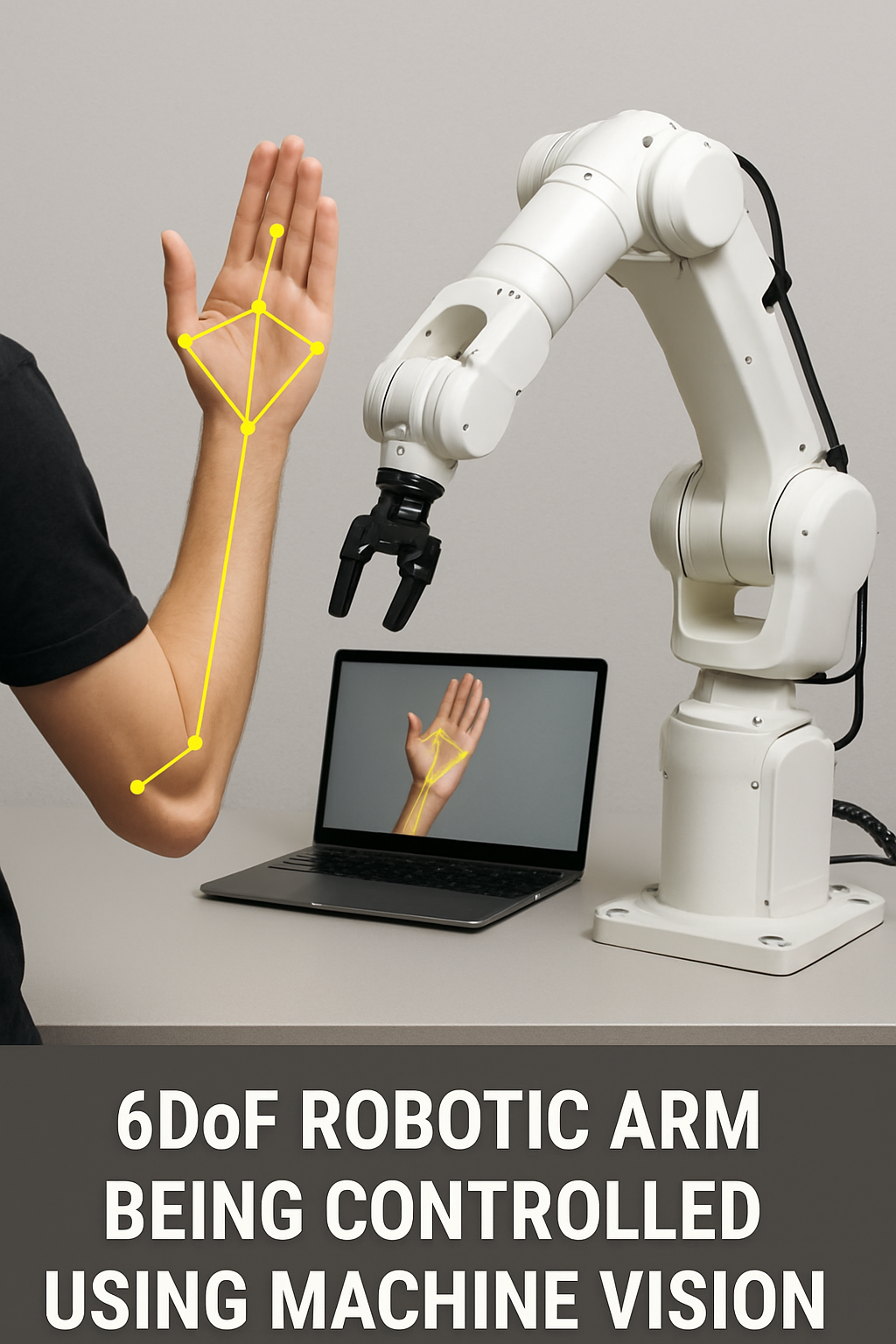
Machine Vision Controlled Robot Arm
Developed a 6DoF robotic arm controlled via machine vision and motion planning; assembled using 3D-printed parts.

Delivery UAV Robot
Led development of a UAV robot capable of identifying indoor environments using UV light, sensors, and machine vision. Navigates environments autonomously by line tracking and object juking and complete human avoidance.

6DoF Manipulator Modeling and Control
Modeled a 6DoF robotic manipulator in Gazebo using URDF; used MoveIt and ROS for trajectory planning and control.

Production Line Integration
Designed and implemented a production line using conveyors, sensors, and motors for automatic assembly/disassembly.

Automatic Sensing Wheelchair
Built a smart wheelchair that detects obstacles and uses vibration feedback on handles to alert the user.
Show all projects from this degree

Mechanization of Handmade Kiln Looms
Graduation project aimed at automating the process of handwoven kilns through custom-built machinery and software.
Machine Vision Classifier (COCO Dataset)
Built an image classifier using CNN, KNN, and SVM on the COCO dataset; compared algorithms for effectiveness.